Firebot
Created on 13 Nov 2020
Autonomous Robot Firefighter

| Part | Cost | Quantity | Total |
| Project Totals: | 0 | $0 | |
| Track 1 Base Budget: | $250.00 | ||
| Preferred Vendor Budget Bonus: | $50.00 | ||
| Remaining Budget: | $300.00 |


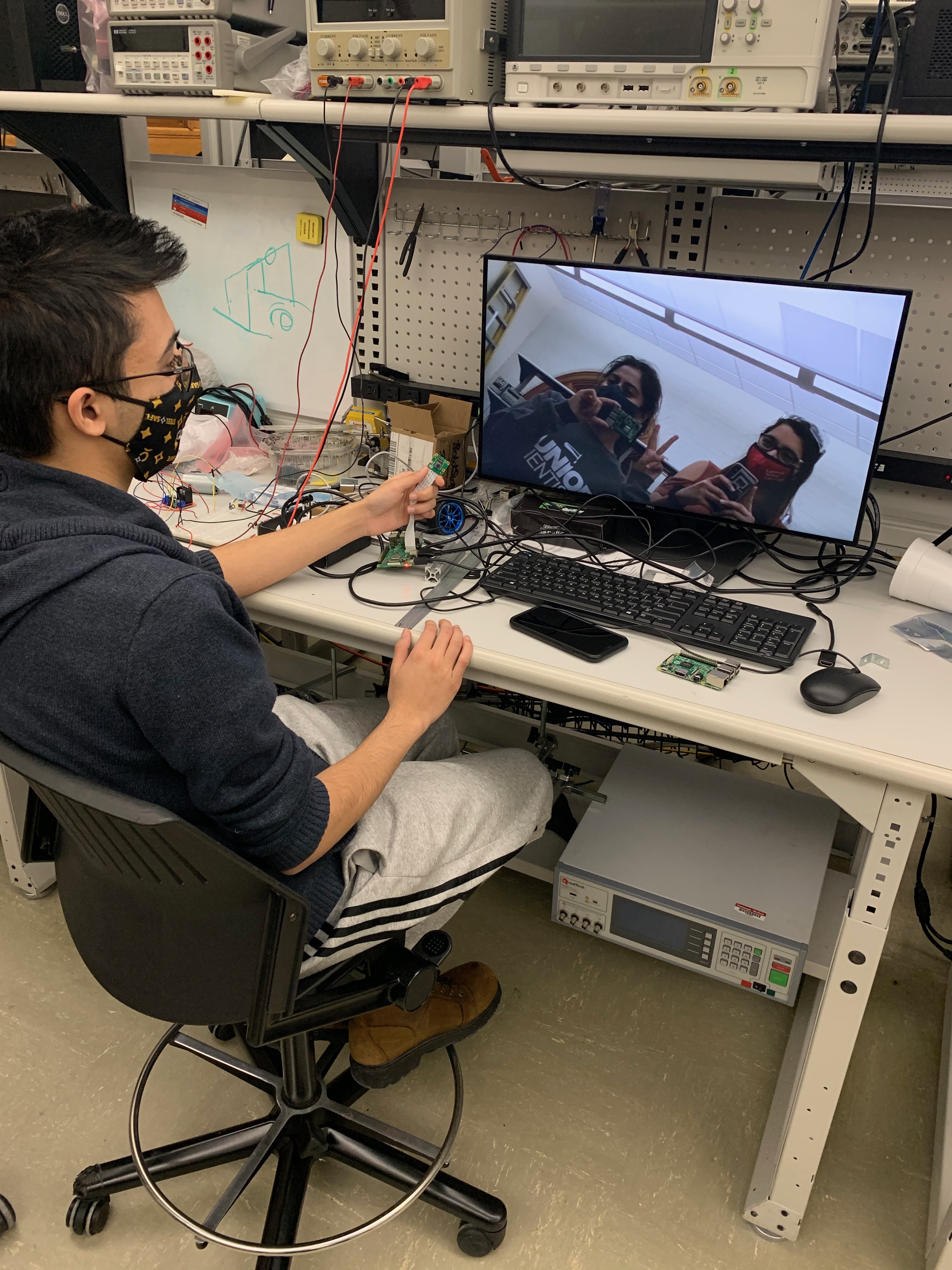








Ishaan connected the Rapsberry Pi to wifi and got the camera working. Wrote CV to detect fires.
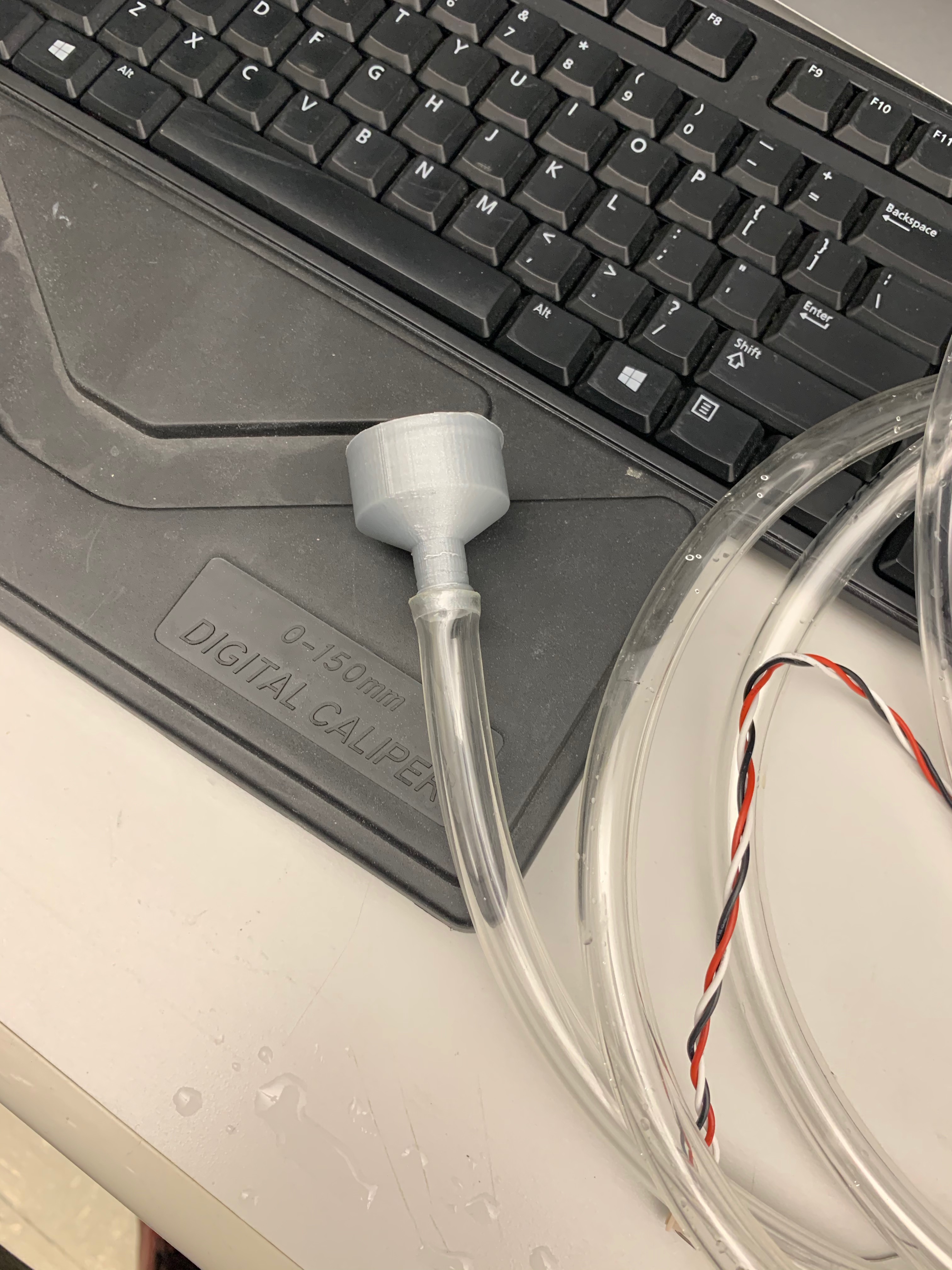
Ryan 3D iterated on design for nozzle and brackets and 3D printed newer versions. Sealed the nozzle to the water reservoir.
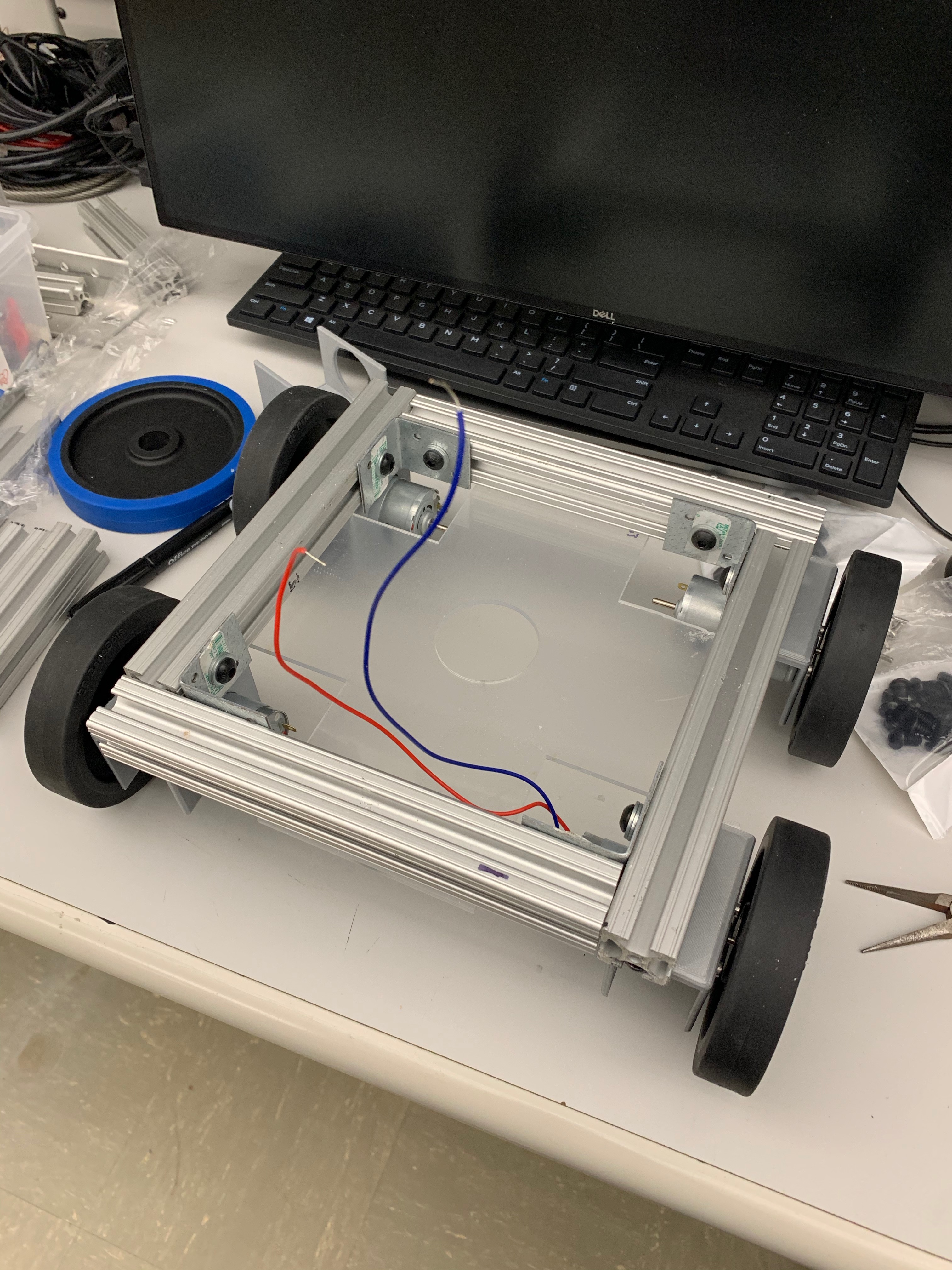
Tarana drilled holes into some old scrap metal to make some L-brackets using the Machine Shop in TechSpark.
Rashmi assembled frame of robot using aforementioned L-brackets.
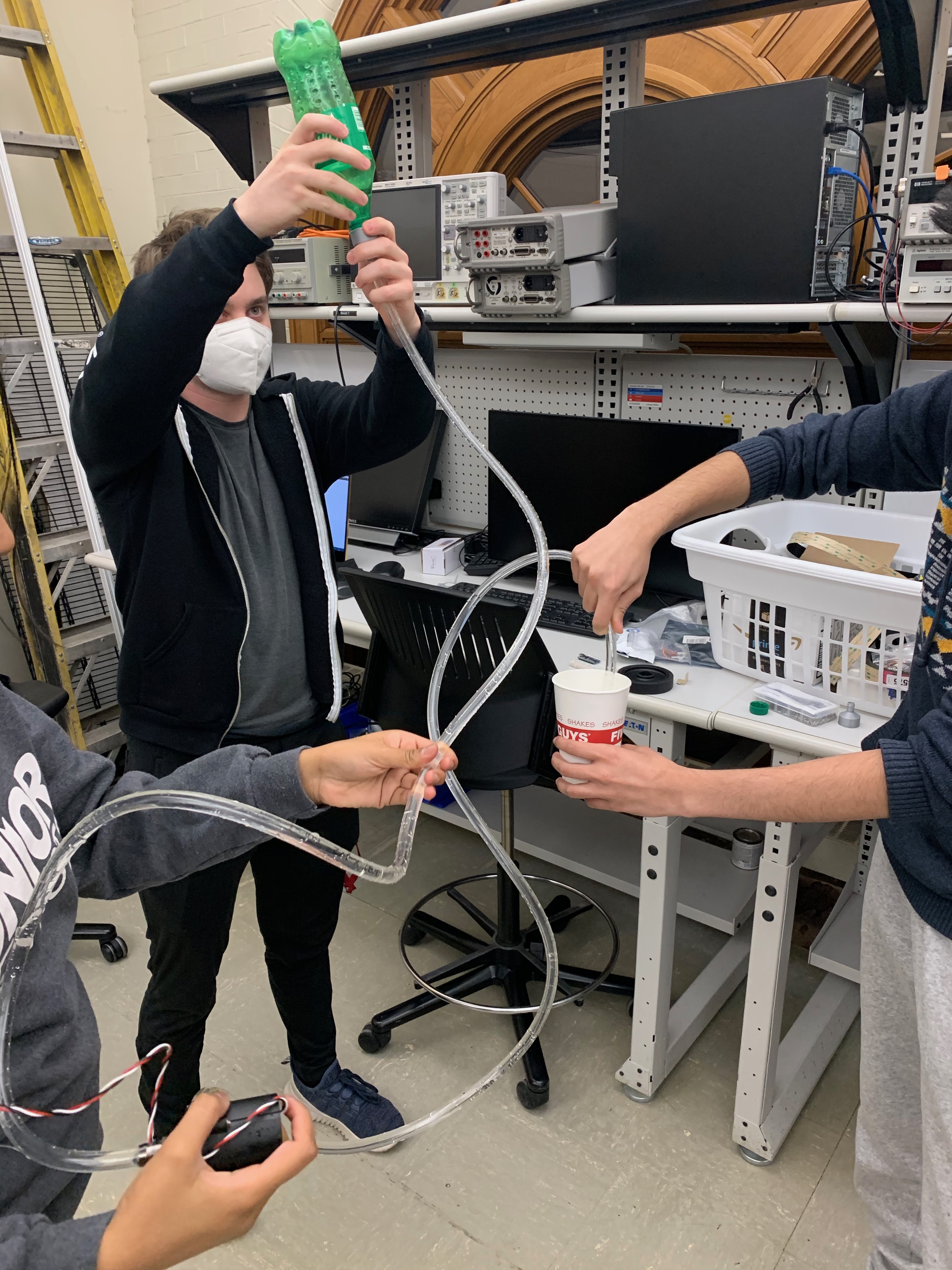
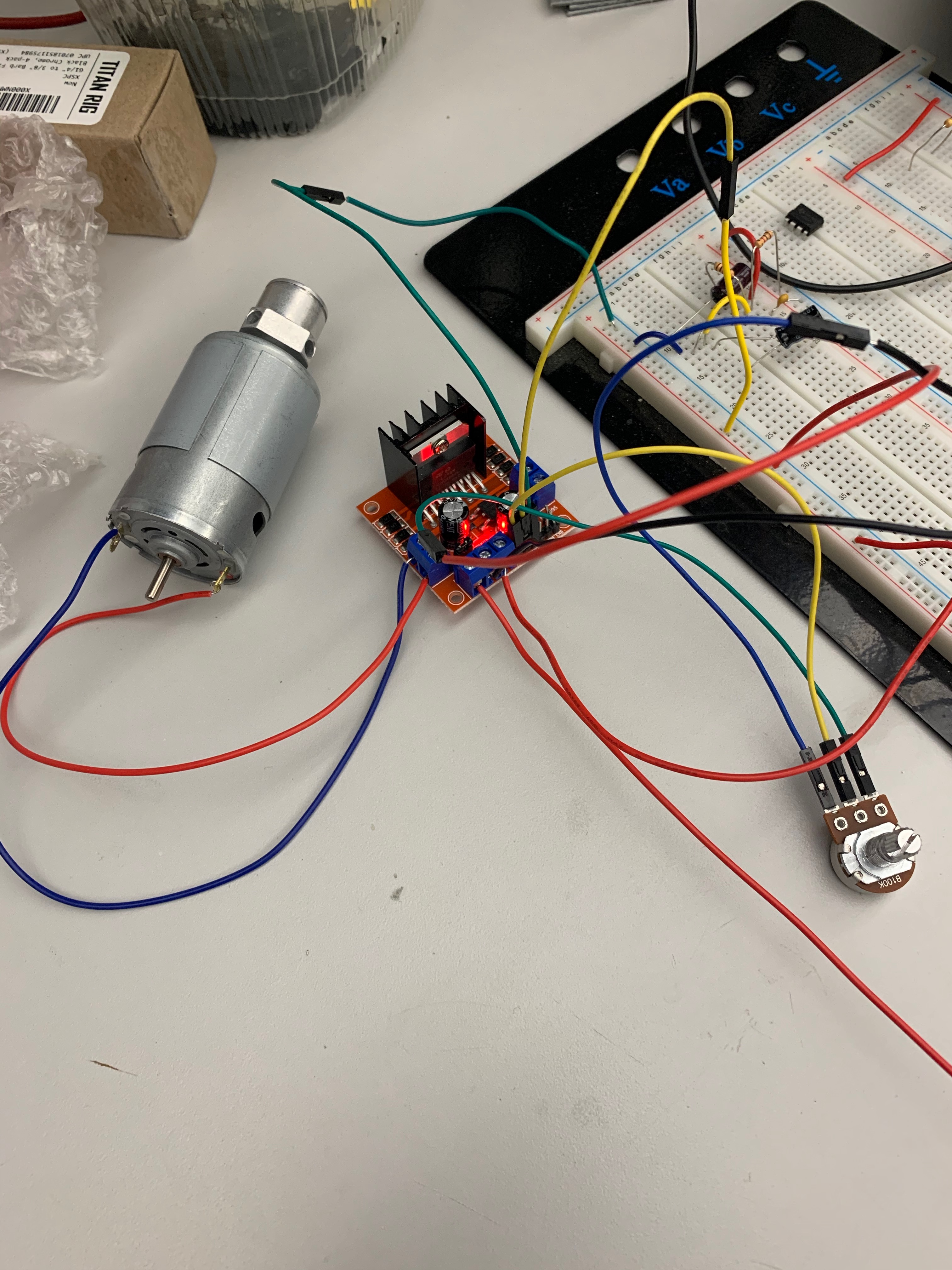
Assembled water-yeeting mechanism and tested it with relative success. 3D printed brackets to mount motors to robot frame + a funnel to feed water into the reservoir. Worked on code to control the motors and make them move.

We briefly met up today in order to gather our parts and design our robot, We unpackaged all of our parts to check and make sure we had all the necessary materials to build our autonomous fire fighting robot.
Some of the issues we noticed:
- The pump we bought doesn't stop water from flowing through it. That is, we need to design our robot in such a way that the output is higher than the input / reservoir.
- The tube that the pump attaches to is thick and this might make it harder to aim the hose and extinguish the fire.
- The axle on the motor was slightly too thick for the cap
On the hardware side of the robot, we worked on giving the robot the ability to turn. We initially 3D printed prototype turning mechanisms for the wheels, but they did not work too well. We then switched to large castor wheels for the 2 back wheels with the front 2 wheels controlling turning direction. We also used milling machines to machine L-brackets to size so they didn't get in the way of other parts. Also, we used tap drill to thread rods into the acrylic base to support. On the software side, we connected the raspberry pi to the Arduino over serial so that the Raspberry Pi could determine how the Arudino should control the motors.
Rashmi & Ishaan got the Rapsberry Pi set up and working. The camera now runs and is able to detect fires, and communicate with the Arduino over serial.
Tarana worked on getting the motor controllers set up to make the robot move and turn as desired, wiring two motor controllers to the four motors and total and controlling them with an Arduino.
Ryan CADded a nozzle to connect our water reservoir to the hose and brackets to house the motors in the frame.