CMUCar
Created on 12 Oct 2019
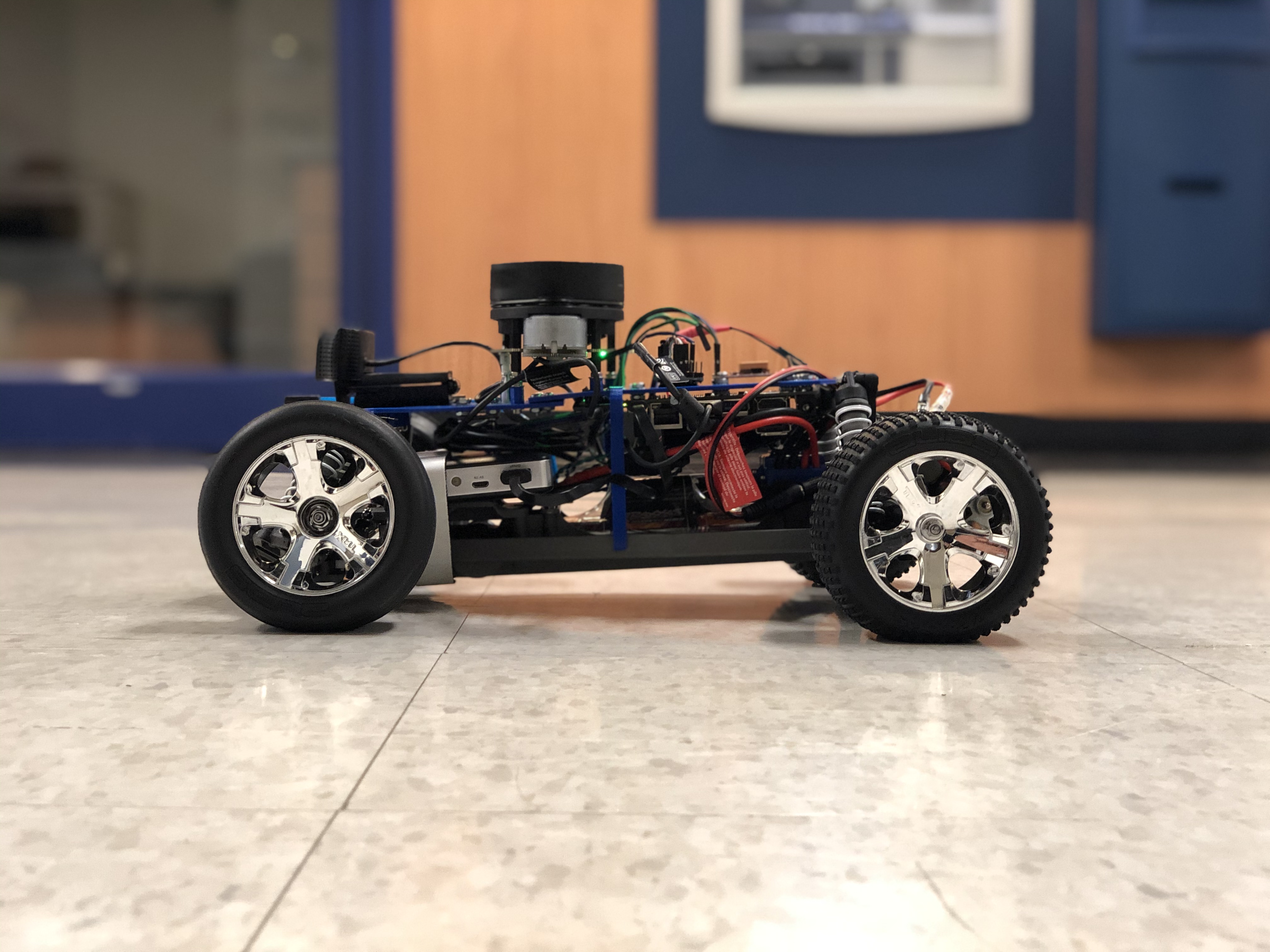
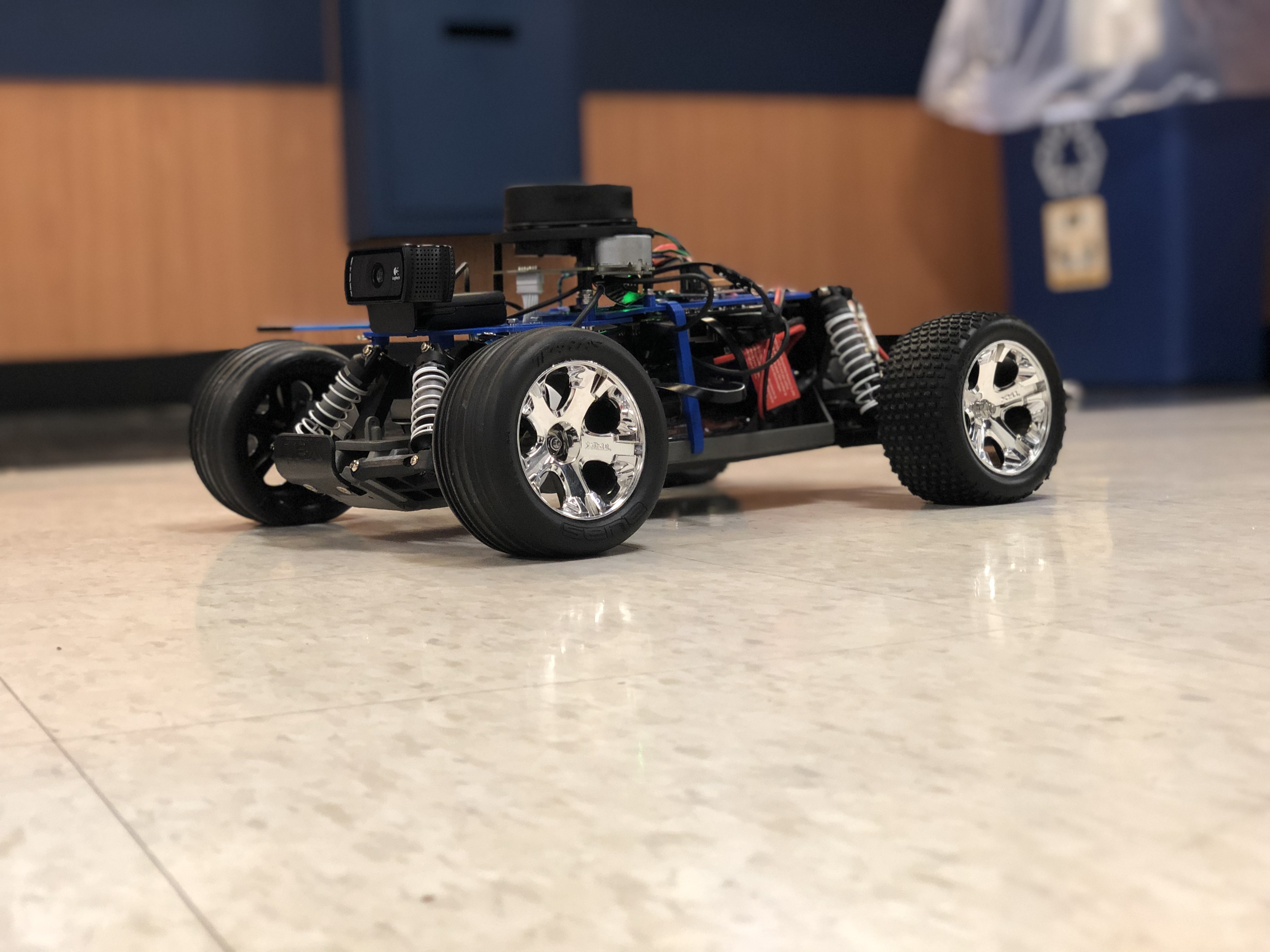
A self-driving car capable of driving around CMU's campus
We plan to design a self-driving racecar capable of driving around CMU's campus. Using GPS as localization and LIDAR for obstacle avoidance, the end-goal of this project is to navigate from waypoints predetermined on campus. A camera for additional obstacle avoidance will be added, time-permitting.
Parts wish list:
https://docs.google.com/spreadsheets/d/12dJJd1rGwWoDmxVZ-WzkafLXldYq_HABJ7xWEtCwFOA/edit?usp=sharing



| Part | Cost | Quantity | Total |
| USB Wifi Adapter | $19.95 | 1 | $19.95 |
| Used to communicate wirelessly with the Jetson | |||
| Sparkfun LS9DS1 | $15.95 | 0 | $0.00 |
| IMU to help with car localization. Reused from another project | |||
| Sparkfun GPS Breakout | $39.95 | 1 | $39.95 |
| GPS Breakout board to help localize the car. Accurate to 2.5m and 10Hz refresh rate. | |||
| NVIDIA Jetson Nano | $99.00 | 1 | $99.00 |
| A NVIDIA Jetson Nano for onboard vision processing | |||
| RPLidar | $99.00 | 1 | $99.00 |
| A Lidar used for obstacle detection | |||
| LED Strip | $8.95 | 4 | $35.80 |
| LED Strips for the car | |||
| DC Power Jack | $2.50 | 1 | $2.50 |
| Power jack for powering the Jetson Nano | |||
| Barrel Jack extension cable | $1.75 | 1 | $1.75 |
| Probably going to cut and splice one end of this to power the Jetson with a nice shielded cable | |||
| Project Totals: | 10 | $297.95 | |
| Track 1 Base Budget: | $250.00 | ||
| Preferred Vendor Budget Bonus: | $50.00 | ||
| Remaining Budget: | $2.05 | ||