Buggy collision Avoidance
Created on 19 Oct 2018
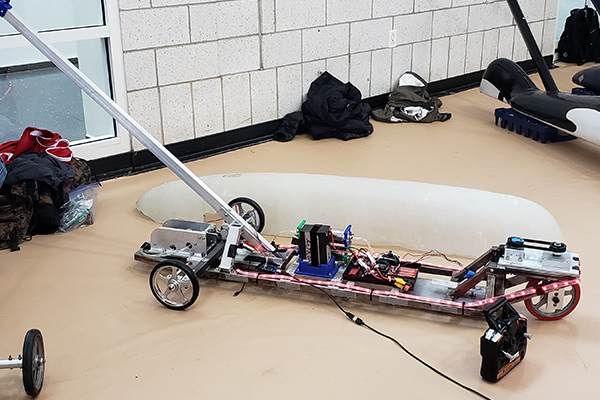
Seeking to make a buggy able to detect and avoid other buggies using sensors
Currently our autonomous buggy relies on mostly gps to navigate around the sweepstakes course, limiting the ability to detect the presence of other buggies or obstacles. We want to solve this issue by creating a field of radars around the buggy to identify obstacles and their position, so that we can find the best way to alter our path based upon these obstacles. The goal is then to enable our autonomous buggy to be able to race a non autonomous buggy.

| Part | Cost | Quantity | Total |
| shunt voltage reference | $0.89 | 3 | $2.67 |
| fixed voltage for power regulation | |||
| microcontroller | $10.64 | 3 | $31.92 |
| microcontroller to create an interface with the radar chip | |||
| Radar System on a Chip | $65.35 | 3 | $196.05 |
| the radar chip that everything else will be built around, processes the radar signals | |||
| 16 Mhz clock | $1.06 | 3 | $3.18 |
| for parts that need 16 Mhz clock | |||
| 40 Mhz clock | $0.96 | 3 | $2.88 |
| clock for parts that need 40Mhz | |||
| ferrite bead | $0.18 | 6 | $1.08 |
| to block out high frequency noise | |||
| Power regulator | $5.75 | 3 | $17.25 |
| programable voltage regulator | |||
| Power regulator | $4.19 | 3 | $12.57 |
| power regulator for soft boot up of system | |||
| flash memory | $1.84 | 3 | $5.52 |
| needed for installing all of the settings for the radar on bootup | |||
| Power regulator | $2.83 | 3 | $8.49 |
| power regulator to take our input voltage down to what is required | |||
| esd protection | $0.57 | 6 | $3.42 |
| electrostatic discarge protection | |||
| Project Totals: | 39 | $285.03 | |
| Track 2 Base Budget: | $250.00 | ||
| Preferred Vendor Budget Bonus: | $50.00 | ||
| Remaining Budget: | $14.97 | ||